Este sensor es un giroscopio y acelerómetro de tres ejes. Pulsa aquí para ver más información del sensor MPU-6050.

En el PC se utiliza un programa realizado en Lazarus que recibe los datos del MPU-6050 y los visualiza en forma de gráfico...
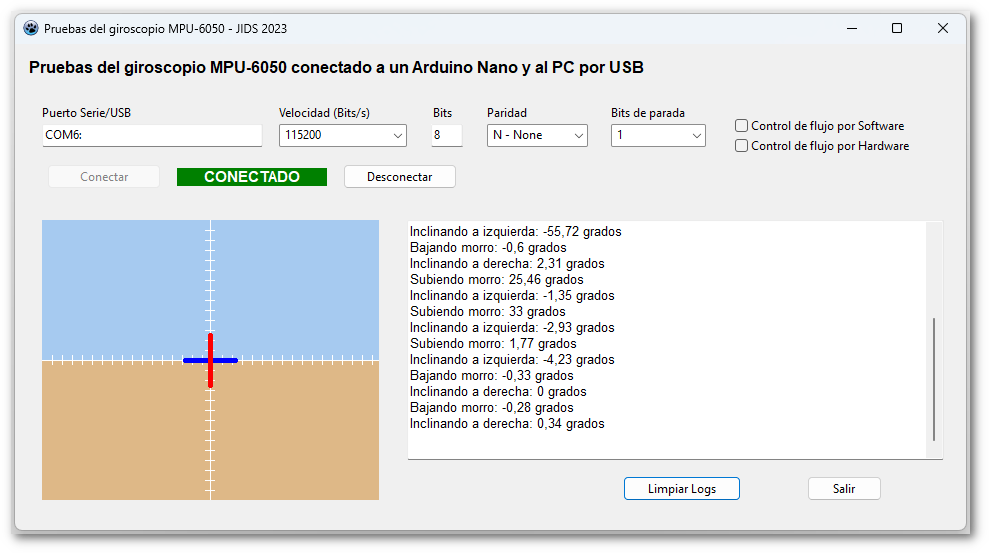
El programa propone por defecto el puerto "COM6:" en Windows y el puerto "/dev/ttyUSB0" en Linux. Si se tratase de otro puerto habrá que cambiarlo en la pantalla del programa...

Vídeo del funcionamiento de este montaje (Archivo MP4. Tamaño: 145 MB)

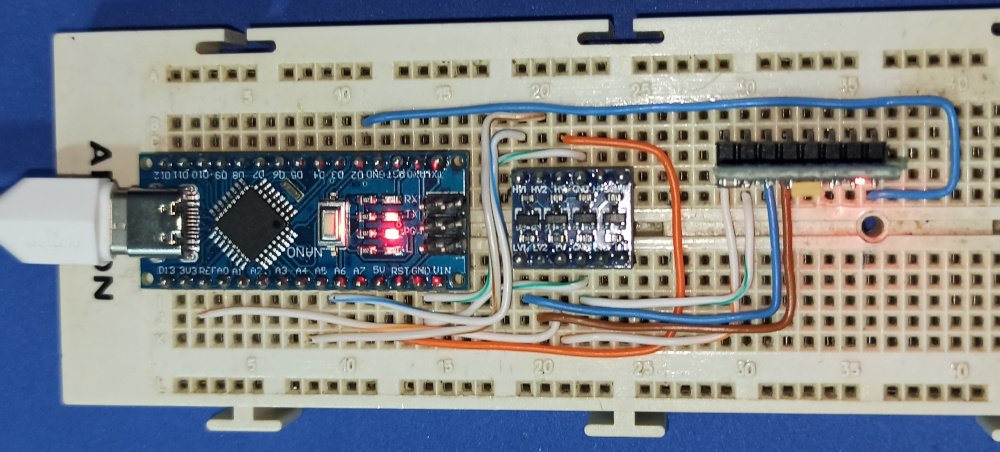
En este montaje se usa la conexión con protocolo I2C para la comunicación entre el sensor y el Arduino Nano. Se utiliza un "Level Converter MH" de 4 conexiones para convertir el voltaje de las señales de 5V del Arduino Nano a las señales de 3.3V del MPU-6050.

Cableado entre el Arduino Nano, el conversor de nivéles lógicos y el sensor MPU-6050
| Arduino Nano | Conversor voltajes | Sensor MPU-6050 |
|---|---|---|
| GND | GND | GND |
| 5V | HV | - |
| 3V | LV | VCC |
| A5 | HV1 | - |
| A4 | HV2 | - |
| - | LV1 | SCL |
| - | LV2 | SDA |
| D2 | - | INT |
Programación del Arduino Nano con el sensor MPU-6050
Para probar el funcionamiento de este sensor se ha utilizado en el Arduino Nano el programa "MPU6050_angulo.ino" que ofrece la página web https://arduproject.es/mpu6050-y-su-programacion/ y que se puede descargar desde el repositorio de GitHub "DRONE DESDE CERO - Sensor MPU6050". En las siguientes líneas se muestra ese programa...
/*
Leer sensor MPU6050 (datos raw o sin procesar)
Más información en https://arduproject.es/mpu6050-y-su-programacion/
*/
#define usCiclo 5000 // Ciclo de ejecución de software en microsegundos
#include <Wire.h>
// MPU6050
#define MPU6050_adress 0x68
float gyro_Z, gyro_X, gyro_Y, temperature, gyro_X_cal, gyro_Y_cal, gyro_Z_cal;
int gx, gy, gz, cal_int;
float acc_total_vector, ax, ay, az;
bool set_gyro_angles, accCalibOK = false;
float acc_X_cal, acc_Y_cal, acc_Z_cal, angulo_pitch_acc, angulo_roll_acc, angulo_pitch, angulo_roll;
long tiempo_ejecucion, loop_timer;
void setup() {
Wire.begin();
Serial.begin(115200);
// Iniciar sensor MPU6050
MPU6050_iniciar();
// Calibrar giroscopio y acelerómetro. El sensor tiene que estar inmovil y en una supercifie plana.
// Leer los datos del MPU6050 3000 veces y calcular el valor medio
for (cal_int = 0; cal_int < 3000 ; cal_int ++) {
MPU6050_leer(); // Leer sensor MPU6050
gyro_X_cal += gx;
gyro_Y_cal += gy;
gyro_Z_cal += gz;
acc_X_cal += ax;
acc_Y_cal += ay;
acc_Z_cal += az;
delayMicroseconds(50);
}
gyro_X_cal = gyro_X_cal / 3000;
gyro_Y_cal = gyro_Y_cal / 3000;
gyro_Z_cal = gyro_Z_cal / 3000;
acc_X_cal = acc_X_cal / 3000;
acc_Y_cal = acc_Y_cal / 3000;
acc_Z_cal = acc_Z_cal / 3000;
accCalibOK = true;
loop_timer = micros();
}
void loop() {
// Nuevo ciclo
while (micros() - loop_timer < usCiclo);
tiempo_ejecucion = (micros() - loop_timer) / 1000;
loop_timer = micros();
MPU6050_leer(); // Leer sensor MPU6050
MPU6050_procesar(); // Procesar datos del sensor MPU6050
// Monitor Serie
Serial.print(angulo_pitch);
Serial.print("\t");
Serial.println(angulo_roll);
}
// Iniciar sensor MPU6050
void MPU6050_iniciar() {
Wire.beginTransmission(MPU6050_adress);
Wire.write(0x6B); // PWR_MGMT_1 registro 6B hex
Wire.write(0x00); // 00000000 para activar
Wire.endTransmission();
Wire.beginTransmission(MPU6050_adress);
Wire.write(0x1B); // GYRO_CONFIG registro 1B hex
Wire.write(0x08); // 00001000: 500dps
Wire.endTransmission();
Wire.beginTransmission(MPU6050_adress);
Wire.write(0x1C); // ACCEL_CONFIG registro 1C hex
Wire.write(0x10); // 00010000: +/- 8g
Wire.endTransmission();
}
// Leer sensor MPU6050
void MPU6050_leer() {
// Los datos del giroscopio y el acelerómetro se encuentran de la dirección 3B a la 14
Wire.beginTransmission(MPU6050_adress); // Empezamos comunicación
Wire.write(0x3B); // Pedir el registro 0x3B (AcX)
Wire.endTransmission();
Wire.requestFrom(MPU6050_adress, 14); // Solicitar un total de 14 registros
while (Wire.available() < 14); // Esperamos hasta recibir los 14 bytes
ax = Wire.read() << 8 | Wire.read(); // 0x3B (ACCEL_XOUT_H) & 0x3C (ACCEL_XOUT_L)
ay = Wire.read() << 8 | Wire.read(); // 0x3D (ACCEL_YOUT_H) & 0x3E (ACCEL_YOUT_L)
az = Wire.read() << 8 | Wire.read(); // 0x3F (ACCEL_ZOUT_H) & 0x40 (ACCEL_ZOUT_L)
temperature = Wire.read() << 8 | Wire.read(); // 0x41 (TEMP_OUT_H) & 0x42 (TEMP_OUT_L)
gx = Wire.read() << 8 | Wire.read(); // 0x43 (GYRO_XOUT_H) & 0x44 (GYRO_XOUT_L)
gy = Wire.read() << 8 | Wire.read(); // 0x45 (GYRO_YOUT_H) & 0x46 (GYRO_YOUT_L)
gz = Wire.read() << 8 | Wire.read(); // 0x47 (GYRO_ZOUT_H) & 0x48 (GYRO_ZOUT_L)
}
// Cálculo de velocidad angular (º/s) y ángulo (º)
void MPU6050_procesar() {
// Restar valores de calibración del acelerómetro
ax -= acc_X_cal;
ay -= acc_Y_cal;
az -= acc_Z_cal;
az = az + 4096;
// Restar valores de calibración del giroscopio y calcular
// velocidad angular en º/s. Leer 65.5 en raw equivale a 1º/s
gyro_X = (gx - gyro_X_cal) / 65.5;
gyro_Y = (gy - gyro_Y_cal) / 65.5;
gyro_Z = (gz - gyro_Z_cal) / 65.5;
// Calcular ángulo de inclinación con datos del giroscopio
// 0.000000266 = tiempo_ejecucion / 1000 / 65.5 * PI / 180
angulo_pitch += gyro_X * tiempo_ejecucion / 1000;
angulo_roll += gyro_Y * tiempo_ejecucion / 1000;
angulo_pitch += angulo_roll * sin((gz - gyro_Z_cal) * tiempo_ejecucion * 0.000000266);
angulo_roll -= angulo_pitch * sin((gz - gyro_Z_cal) * tiempo_ejecucion * 0.000000266);
// Calcular vector de aceleración
// 57.2958 = Conversion de radianes a grados 180/PI
acc_total_vector = sqrt(pow(ay, 2) + pow(ax, 2) + pow(az, 2));
angulo_pitch_acc = asin((float)ay / acc_total_vector) * 57.2958;
angulo_roll_acc = asin((float)ax / acc_total_vector) * -57.2958;
// Filtro complementario
if (set_gyro_angles) {
angulo_pitch = angulo_pitch * 0.99 + angulo_pitch_acc * 0.01;
angulo_roll = angulo_roll * 0.99 + angulo_roll_acc * 0.01;
}
else {
angulo_pitch = angulo_pitch_acc;
angulo_roll = angulo_roll_acc;
set_gyro_angles = true;
}
}
Pulsa aquí para descargar el código "MPU6050_angulo.ino" o accede al repositorio de GitHub del creador de este programa: "DRONE DESDE CERO - Sensor MPU6050"
Programa para el PC
- Descargar ejecutable del programa para un PC con Linux tipo Debian de 64 bits: mpu6050laz-lin-ejecutable.zip (Archivo ZIP. Tamaño: 6,7 MB)
- Descargar ejecutable del programa para un PC con Windows: mpu6050laz-win-ejecutable.zip (Archivo ZIP. Tamaño: 5,1 MB)
- Descargar el código fuente del programa para un PC con Linux: mpu6050laz-lin-fuentes.zip (Archivo ZIP. Tamaño: 8,3 MB)
- Descargar el código fuente del programa para un PC con Windows: mpu6050laz-win-fuentes.zip (Archivo ZIP. Tamaño: 2,8 MB)
- Descargar la librería SYNAPSE desde la web de Ararat: http://www.ararat.cz/synapse/lib/exe/fetch.php/file:synapse40.zip (Archivo ZIP. Tamaño 898 KB)
Ver información del sensor MPU-6050